< img id="wx_img" src="https://www.qbitai.com/wp-content/uploads/imgs/qbitai-logo-1.png" width="400" height="400">
刚刚,LeCun团队让世界模型学会持续学习!
迈向持续学习的世界模型
henry 发自 凹非寺
量子位 | 公众号 QbitAI
世界模型,也能持续学习了!
刚刚,纽约大学联合LeCun初创
带来JEPA系列的最新成果——
与过去在预训练结束后就冻结参数的世界模型不同,AdaJEPA能够在与环境交互中,基于
(Test-Time Adaptation, TTA),实时调整
世界模型的编码器和预测器参数
具体而言,AdaJEPA通过
计划、执行、观测、更新、再规划
的闭环,在每次交互中只执行MPC规划出的第一段动作,然后把真实观察到的下一帧状态,当成自监督信号来更新世界模型。
由此,在下一轮规划时用的就不再是刚部署时那个冻结模型,而是已经被当前环境“校准”过的模型。
这个思路有点像经典强化学习里的
模型不是一次训练完就结束,而是在真实交互中不断修正自己对世界的理解。
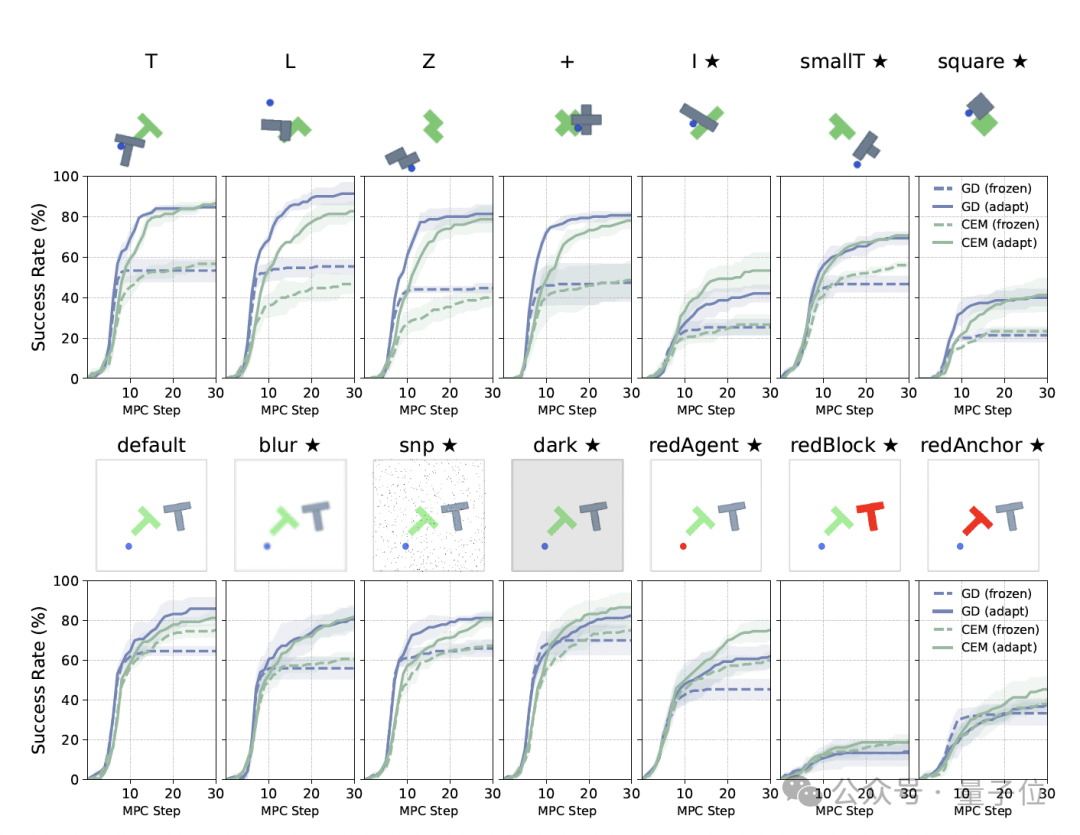
实验结果也表明,无论是在分布内环境,还是面对各类分布外偏移,AdaJEPA的规划成功率都明显优于固定世界模型。
计划、执行、观测、更新、再规划
一直以来,基于JEPA路线的隐空间世界模型,都有一个默认前提,就是模型训练完,就冻结参数。
模型先在离线轨迹上学习把高维图像压进latent space,然后再在这个隐空间里预测未来。
到了测试阶段,MPC(Model Predictive Control,模型预测控制)就会调用这个冻结的世界模型,在隐空间里向前滚动“想象”未来,优化出一串动作,再把第一步动作拿到真实环境里执行。
(注:MPC的核心思想是每次只往前预测一小段,算出一串动作,但先只执行第一步。等真实环境反馈回来,再重新预测、重新规划)
环境一变,冻结世界模型就容易失准。
当系统面临测试时分布偏移(Test-time Distribution Shift)时,在latent space里看起来能到达目标的动作,落到真实环境里,可能一步都不对。
更麻烦的是,MPC本来就靠短时域滚动规划,单步误差往后滚几步,就会被放大。
为解决这一问题,论文提出AdaJEPA框架。
它的核心判断是:世界模型不该训练完就固定在那里。它应该像真正部署中的智能体一样,一边行动,一边用新经验校准自己。
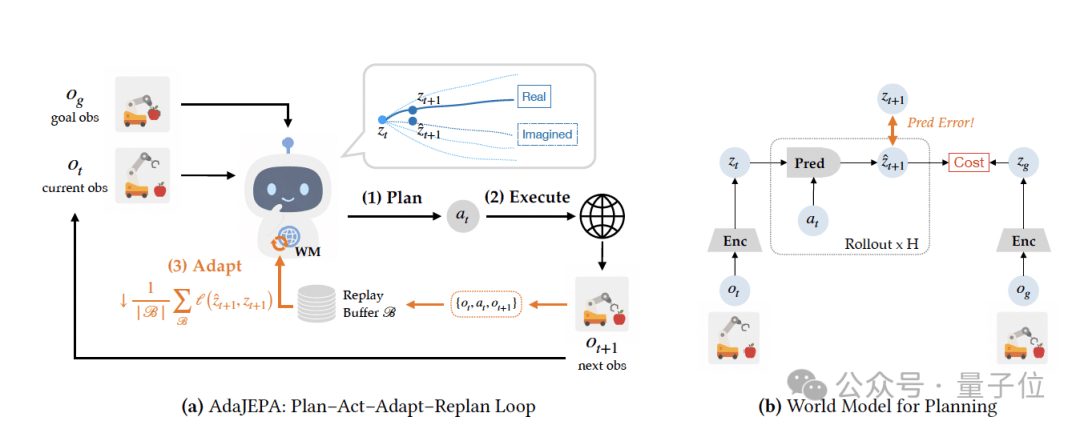
具体来说,AdaJEPA的循环可以分为四步:
:模型先把当前观测编码成latent state,然后用当前世界模型进行MPC,在隐空间里向前滚动预测,找出一串最接近目标状态的动作。
:模型不会一次性执行完整动作序列,而是只执行第一段动作。随后,真实环境返回下一帧观测。
:把这次真实状态转移存进在线缓存区。AdaJEPA再让模型根据观测和动作预测下一步latent state,并和真实状态预测编码出的latent state对齐。预测错在哪里,梯度就从哪里回来。
:更新后的世界模型立刻进入下一轮MPC。论文里默认只更新视觉编码器和预测器的最后几层,每次重规划只做1步梯度下降。
由此,AdaJEPA的循环不再只是传统 MPC 的:规划,执行,再规划。
而是变成了:规划,执行,观测,更新,再规划。
世界模型也因此不再只是一个被动调用的“想象器”,而变成了一个会在部署过程中持续校准自己的模块。
在实现上,AdaJEPA的底座依然是JEPA(Joint-Embedding Predictive Architectures),联合嵌入预测架构。
和传统像素级预测世界模型不同,JEPA并不直接预测未来图像,而是先把图像压进一个更紧凑的隐空间,只在latent space里预测未来状态。
具体来说,整个模型由三个核心组件组成:
状态编码器,把当前观测编码成隐状态。
动作编码器 ,把动作编码成动作嵌入。
预测器,根据当前隐状态和动作嵌入,预测下一步隐状态。
AdaJEPA的在线更新,就发生在这个隐空间里。
每次执行动作后,系统都会把真实状态转移存入在线缓存区。这个缓存区不会无限增长,论文里默认只保留最近N条转移。
更新时,AdaJEPA会让模型根据当前观测和动作预测下一时刻的隐状态,再和真实下一帧观测编码出的隐状态对齐。
为了防止在线更新把原本的表征空间拉崩,论文做了两个限制:
一是对目标表征使用stop-gradient;二是只更新少量参数。
实验默认只更新视觉编码器和预测器的最后几层,并且每次MPC重规划只进行1步梯度下降。
所以,这并不是把整个世界模型在线重训一遍。
它更像是每走一步,就用刚刚从真实环境里获得的新反馈,把世界模型往当前环境上轻轻校准一下。